The attributes "Remaining travel time" and "Traffic stream status" are processed as an addition to the request for a traffic stream. For all PT traffic streams, a decision is made as to how a traffic stream can influence the control system depending on the remaining travel time until arrival at the stop line (remaining travel time). The following questions arise:
- Does a PT traffic stream arrive in a request area?
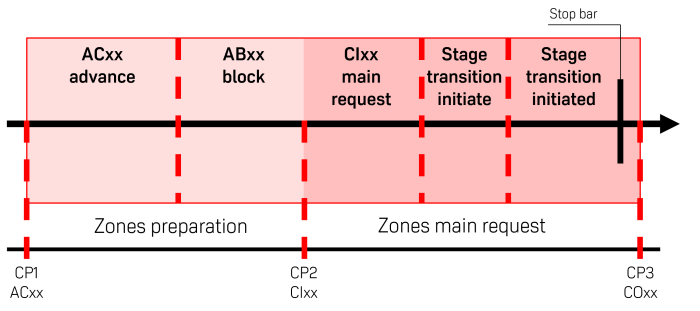
- Is the remaining journey time sufficient to initiate a stage change?
- Do conflicting traffic streams need to be blocked?
- Does the main request have to be initiated?
- Does the change to the PT stage have to be initiated?
vs | plus tracks the requested PT and checks the above questions every second depending on the elapsed travelling time and the theoretical travelling time. It is important to note that only the train that is closest to the stop line is decisive for the allocation of attributes. In addition, the message point that assigns the highest "traffic stream status" attribute is decisive.
vs | plus calculates the expected arrival second every second, i.e. the cycle second TX in which a PT is expected at the intersection. The treatment is based on the variables "detector waiting time" and "traffic stream waiting time" as well as the theoretical travelling time (target value). If several message points are active at the same time (detector waiting time twdet of several message points is less than the holding time), the expected cycle second of the nearest message point applies to all message points. When parametrising a pre-indication time, the expected arrival second is advanced by the value of the pre-indication time when a PT traffic stream is switched on. When "holding a stage", however, the pre-indication time has no influence. All reactions of the requested PT are aligned to the expected arrival second.
If the frame signal for request is not present in the expected arrival second, the journey is "postponed" until the start of the next frame signal for request. This means that the expected arrival second is set to the start of the next frame signal for request. The PT functions are then aligned with the corrected expected arrival second.