Holding a stage:
If the signal of a PT traffic stream and thus the status of the traffic stream is already green at the time of the request, the generally applicable rules of vs | plus apply. In addition, holding green depends on the following criteria:
- The main request must be active
- The expected arrival second must be within the frame signal
vs | plus checks whether the expected arrival second is within the frame signal and the end of the frame signal follows at least tg min1 later.
This takes account of the fact that slightly slower vehicles (slower than theoretical speed) can also hold the green until check out.

Figure 78: Expected cycle second in the frame signal
The permitted green times must not be exceeded. The generally applicable rules of vs | plus apply, such as consideration of green times, frame signal (tg min1 and tg min2 frame-independent; tg max1 and tg max2 frame-dependent) and intervention types.
Stage hold in red:
Up to and including vs | PLUS version 6.2.6, the following applied: If a traffic stream is at the top of the criteria sequence, it cannot be cancelled by any conflicting traffic stream until it logs off or is forcibly deleted - even if the traffic stream is green.
From vs | plus version 8.0.0 there is the criterion: "Hold stage in red" (PhHr). This ensures that the traffic stream only remains at the top of the criteria sequence as long as it is red. As soon as it is green, it loses its top position and can therefore be cancelled by any conflicting traffic stream with the corresponding type of intervention. Only when it is red again is it placed back at the top of the criteria sequence when it is registered. The "stage hold in red" criterion applies to all traffic streams. It also overrides the "stage hold" criterion, even if it follows in the sequence.
Arrival at the frame signal:
vs | plus rates those PTs higher for which the "expected arrival second" lies within the frame signal for request than those PTs for which the expected arrival second has been shifted to the beginning of the following frame signal ("corrected expected arrival second").
Priority classes:
If the priority class criterion is taken into account, traffic streams in priority class 3 are categorised before those in priority class 2 and traffic streams in priority class 2 are categorised before those in priority class 1. If there are 12 priority classes, traffic streams in priority class 12 are categorised before those in class 11 ..... and so on.
Influence zone:
From the first detector or message point to signalling, a PT usually travels through several influence zones. This means that if the signalling distance is long enough, it will first prepare its PT stage and later trigger the main request.
A more detailed breakdown into 5 sub-zones can be illustrated as follows:
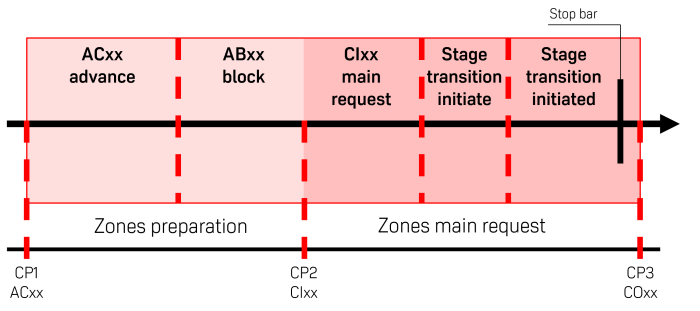
Figure 79: Requirement zones for PT vehicles
If a PT is located in a zone close to the stop line, it has the higher priority. If there are several PT traffic streams in the same zone (e.g. two competing PTs have triggered the main request), further decision criteria must be used.
The PT priority list can be used to prioritise PT traffic streams (e.g. free route has priority over bus stop or train over bus, etc.). The ranking can be set for standard and PT module traffic streams.
VOEV Priority:
PT are taken into account according to the priority classification (if transmitted in the telegram) in accordance with the VOEV regulation.
Schedule position:
PT with longer delays will be considered first.
Expected arrival time:
This means that the PT are taken into account according to the theoretical journey time (target value) or the corrected expected arrival time.
After prioritisation flag without sorting:
The PT that has reached the priority detection value is considered first. However, the traffic stream is not re-sorted.
After prioritisation flag with sorting:
The PT that has reached the priority detection value is considered first. The traffic stream is re-sorted at this point.
User definition:
Free programming (open vs | plus) allows a user to introduce self-defined rules.